Systemarchitektur und Funktionsumfang der Handlingzelle
Die vorliegende Handlingzelle ist als modulare Forschungs- und Testumgebung konzipiert und setzt sich aus zwei technologisch komplementären Hauptkomponenten zusammen:
- Robotergestütztes Handlingsystem: Ein hochflexibler Industrieroboter, ausstattbar mit verschiedenen Greifsystemem und einem stationären Bearbeitungstisch. Diese Einheit dient der Untersuchung vom Teilehandling sowie komplexer Montage- und Fügeprozesse.
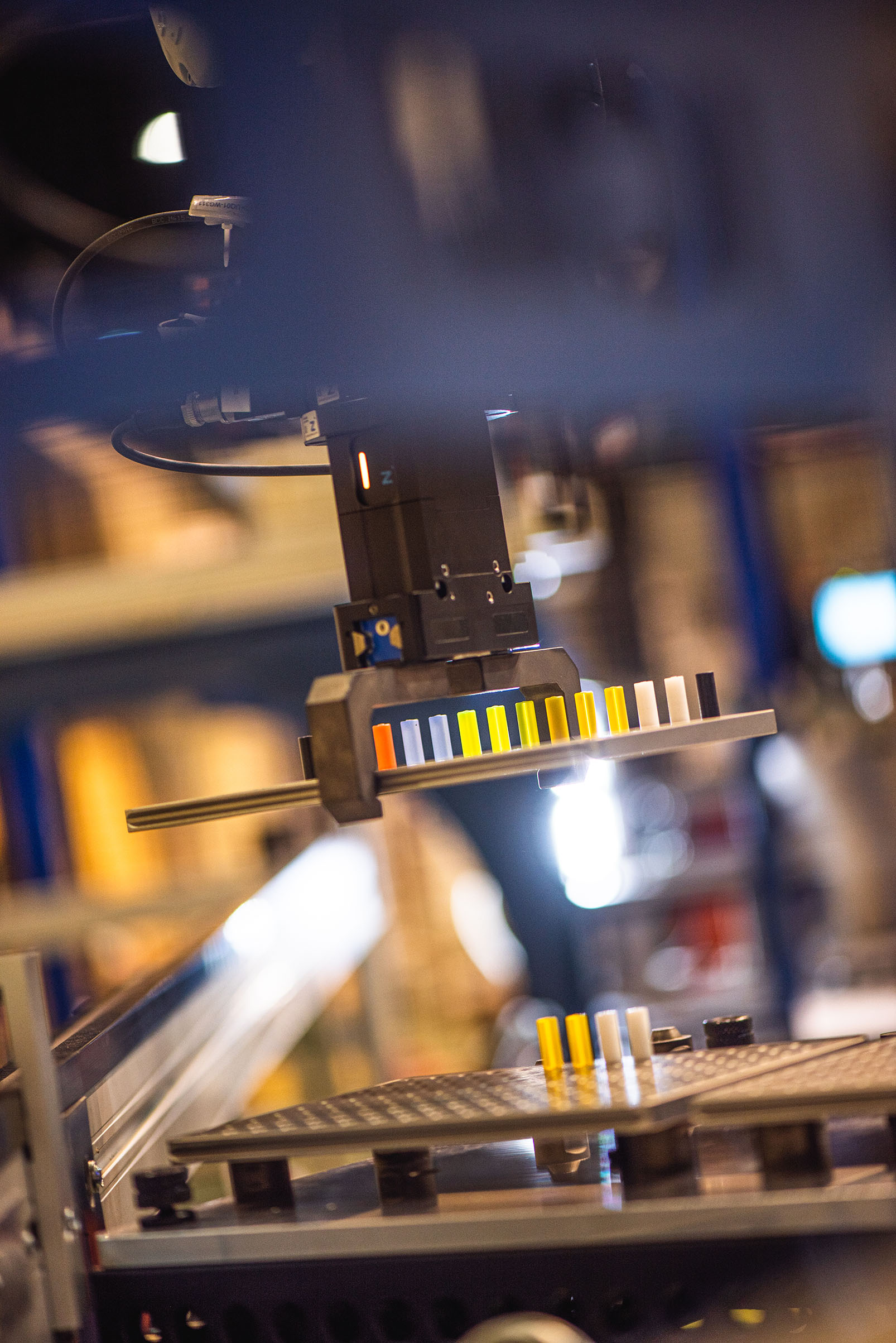
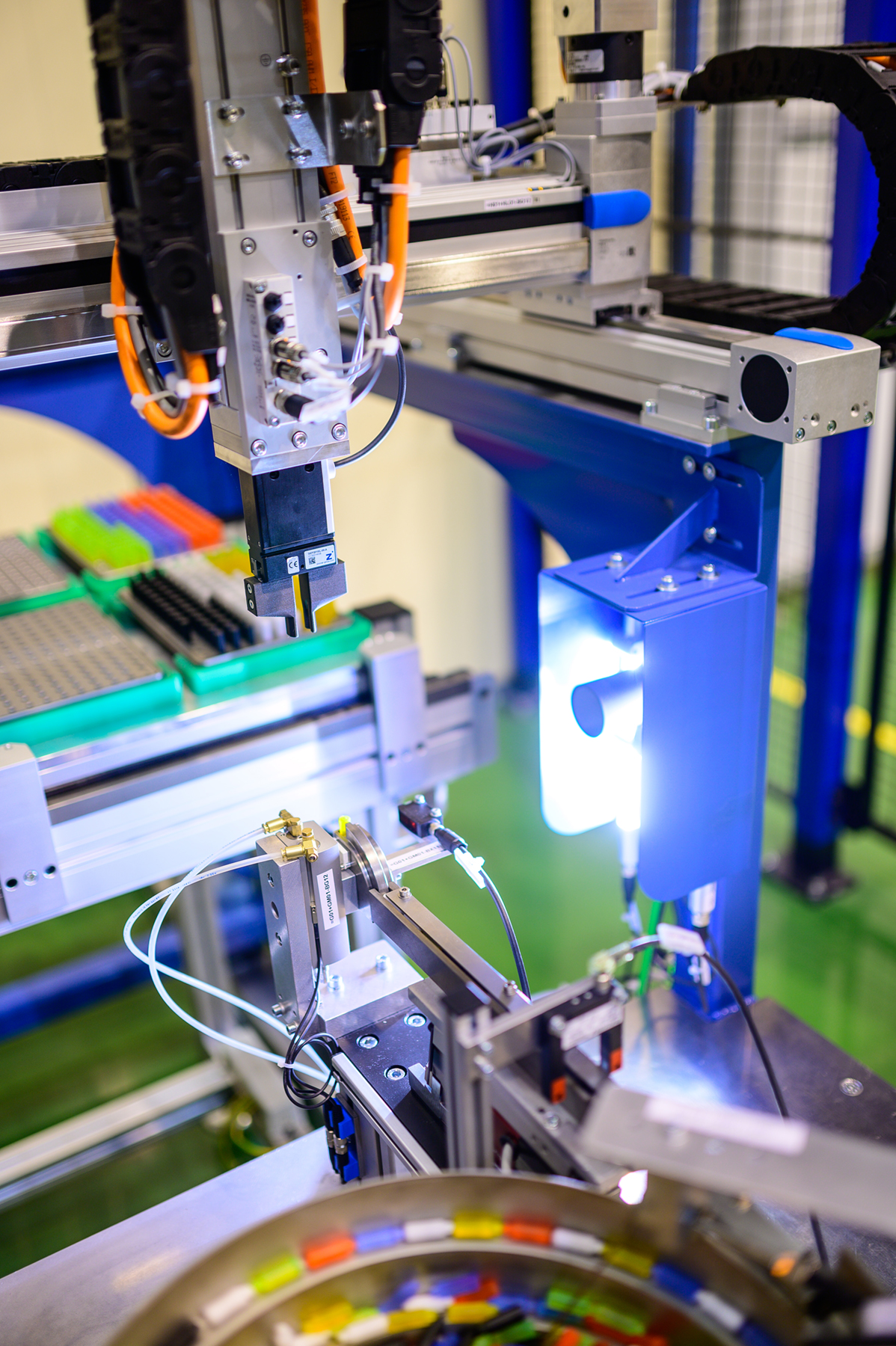
- Lineares 3-Achsportal: Ein System bestehend aus Vereinzelungsstation (Wendelförderer), Achs-Portal und Förderband, welches für Pick-and-Place-Aufgaben und Tests zur Materialflusssteuerung genutzt werden kann.
Untersuchungsschwerpunkte und Prozessanalyse
Beide Handlingeinrichtungen ermöglichen eine detaillierte Evaluierung industrieller Handhabungsprozesse. Im Fokus der wissenschaftlichen und praktischen Untersuchungen stehen insbesondere folgende Aspekte:
- Variable Greiftechnologien: Untersuchungen von mechanischer Greiftechnik (form- oder kraftschlüssig), Vakuum-Saugtechnik oder weitere, um die optimale Handhabungsstrategie für unterschiedliche Oberflächen und Geometrien zu ermitteln.
- Kraftgesteuerte Prozesse: Analyse von Fügevorgängen, bei denen durch sensorbasierte Kraft-Momenten-Regelung (haptisches Feedback) auch empfindliche Bauteile präzise positioniert werden können.
- Intelligente Bauteilerkennung: Einsatz moderner 2D- und 3D-Kameratechnik direkt an der Effektor-Einheit oder stationär, um Objekte lageunabhängig zu identifizieren und autonome Bahnkorrekturen durchzuführen.
- Taktzeit- und Effizienzanalysen: Empirische Untersuchung von Bewegungsabläufen zur Optimierung der Durchlaufzeiten und zur Steigerung der Prozessgeschwindigkeit unter Realbedingungen.



Systemkomponenten
Vereinzelungsstation inkl. Förderband
- Wendelförderer von SMR
- SmartKamera (Farbe) von BALLUFF
- 3-Achs-Portal von FESTO mit 8 kg Traglast und 1000x800x200mm Arbeitsraum
- Doppelgurtförderer von ALTRATEC
Industrieroboter
- Industrieroboter RS010L von KAWASAKI mit 10 kg Traglast und 1,9 m Reichweite
- FT-Sensor von SCHUNK
- Werkzeugwechsel WWR63 von ZIMMER
- Greifer (Pneumatisch intelligent und elektrisch) von ZIMMER
- Sauger von SCHMALZ
Gesamtanlage - Sensorik + Sicherheit
- SPS + F-SPS von SIEMENS
- IO-Link Master + Sensoren von BALLUFF
- Lichtgitter 30 mm Auflösung von SICK
- IPC von TL-Electronic
Haupteigenschaften
- Roboterautomatisiertes Handling
- Arbeitsraum – maximale Bauteilabmessungen BxLxH: 1200 mm x 1200 mm x 800 mm
- Bauteilgewichte bis 7,5 kg (Roboter) oder 5 kg (Portal)


